График работы
Кошик
USD - 41.50грнEUR - 48.7грн
| Бренд | Назва | Наявність | Термін постачання | Ціна | Замовлення | |||
|---|---|---|---|---|---|---|---|---|
| HP (ZEBRA)HP2203 | 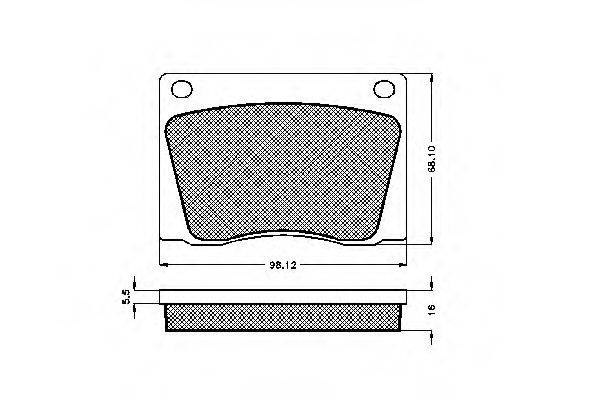 |
Комплект гальмівних колодок, дискове гальмо
Вага, кг]: 1.440
Виконання мосту: Front Гальмівна система: Lucas-Girling Довжина [мм]: 98,12 Номер технічної інформації: 180009 Тип гальма: Дисковий механізм Товщина [мм]: 16 Ширина (мм): 68,1 Якість: 300 |
Уточнити наявність | |||||
Аналоги для HP (ZEBRA) HP2203 | ||||||||
| SPIDAN32647 | |
Комплект гальмівних колодок, дискове гальмо
Вага, кг]: 1.440
Виконання мосту: Front Гальмівна система: Lucas-Girling Довжина [мм]: 98,12 Номер технічної інформації: 180009 Тип гальма: Дисковий механізм Товщина [мм]: 16 Ширина (мм): 68,1 Якість: 300 |
Уточнити наявність | |||||
| FTEBL2244A1 | 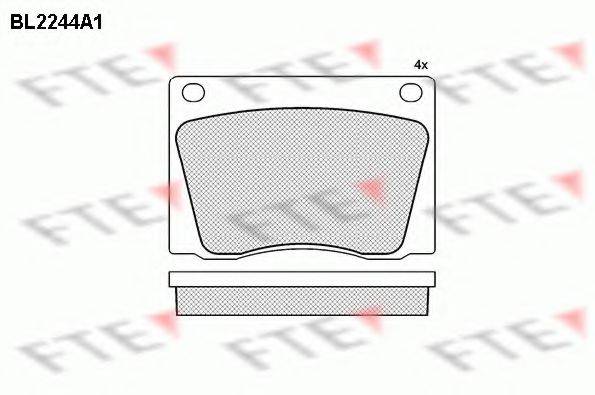 |
Комплект гальмівних колодок, дискове гальмо
Вага, кг]: 1.440
Виконання мосту: Front Висота [мм]: 68,1 Гальмівна система: TRW Довжина [мм]: 98,3 Номер технічної інформації: BL2244A1 Тип гальма: Дисковий механізм Товщина [мм]: 16 Якість: 300 |
Уточнити наявність | |||||
| ICER180009 | 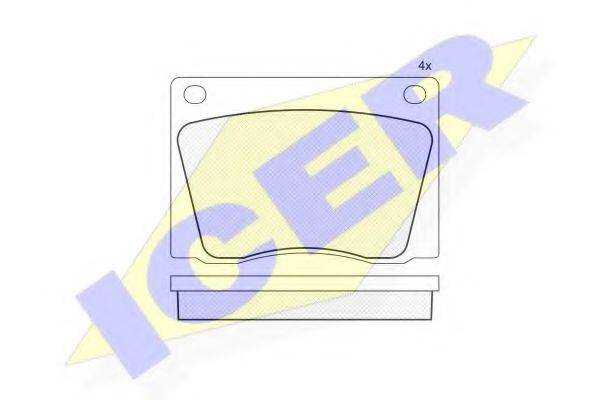 |
Комплект гальмівних колодок, дискове гальмо
Вага, кг]: 1.440
Виконання мосту: Front Висота [мм]: 68,1 Гальмівна система: Lucas - Girling Довжина [мм]: 98,3 Номер технічної інформації: 180009 Тип гальма: Дисковий механізм Товщина [мм]: 16 Якість: 300 |
Уточнити наявність | |||||
| R BRAKERB0009 | 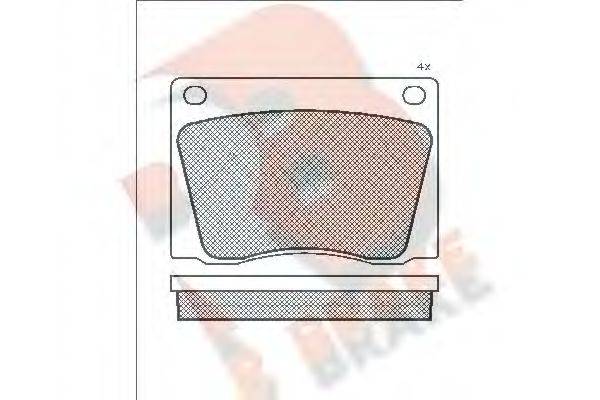 |
Комплект гальмівних колодок, дискове гальмо
Вага, кг]: 1.440
Виконання мосту: Front Висота [мм]: 68,1 Гальмівна система: Lucas - Girling Довжина [мм]: 98,3 Номер технічної інформації: 180009 Тип гальма: Дисковий механізм Товщина [мм]: 16 Якість: 300 |
Уточнити наявність | |||||